Abstract
Experiments
Training Efficiency Analysis
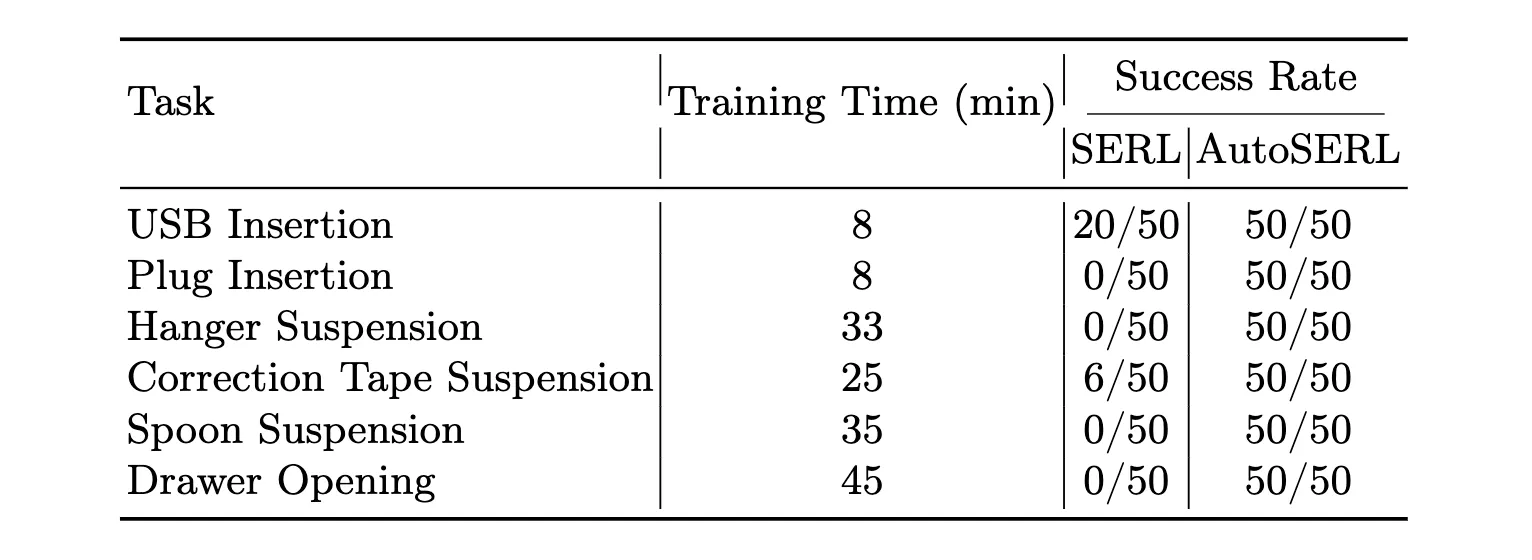
We compare AutoSERL with SERL to evaluate training efficiency. AutoSERL and SERL are assessed by measuring their success rates under identical training durations.
| Task | Training Time | SERL | AutoSERL | ||
|---|---|---|---|---|---|
| Training | Evaluation | Training | Evaluation | ||
| USB Insertion | 8 min |
Trained with SERL for 8 minutes. |
Checkpoint at 8 min, 50 trials, success rate 20/50. |
Trained with AutoSERL for 8 minutes. |
Checkpoint at 8 min, 50 trials, success rate 50/50. |
| Plug Insertion | 8 min |
Trained with SERL for 8 minutes. |
Checkpoint at 8 min, 50 trials, success rate 0/50. |
Trained with AutoSERL for 8 minutes. |
Checkpoint at 8 min, 50 trials, success rate 50/50. |
| Hanger Suspension | 33 min |
Trained with SERL for 33 minutes. |
Checkpoint at 33 min, 50 trials, success rate 0/50. |
Trained with AutoSERL for 33 minutes. |
Checkpoint at 33 min, 50 trials, success rate 50/50. |
| Correction Tape Suspension | 25 min |
Trained with SERL for 25 minutes. |
Checkpoint at 25 min, 50 trials, success rate 6/50. |
Trained with AutoSERL for 25 minutes. |
Checkpoint at 25 min, 50 trials, success rate 50/50. |
| Spoon Suspension | 35 min |
Trained with SERL for 35 minutes. |
Checkpoint at 35 min, 50 trials, success rate 0/50. |
Trained with AutoSERL for 35 minutes. |
Checkpoint at 35 min, 50 trials, success rate 50/50. |
| Drawer Opening | 45 min |
Trained with SERL for 45 minutes. |
Checkpoint at 45 min, 50 trials, success rate 0/50. |
Trained with AutoSERL for 45 minutes. |
Checkpoint at 45 min, 50 trials, success rate 50/50. |
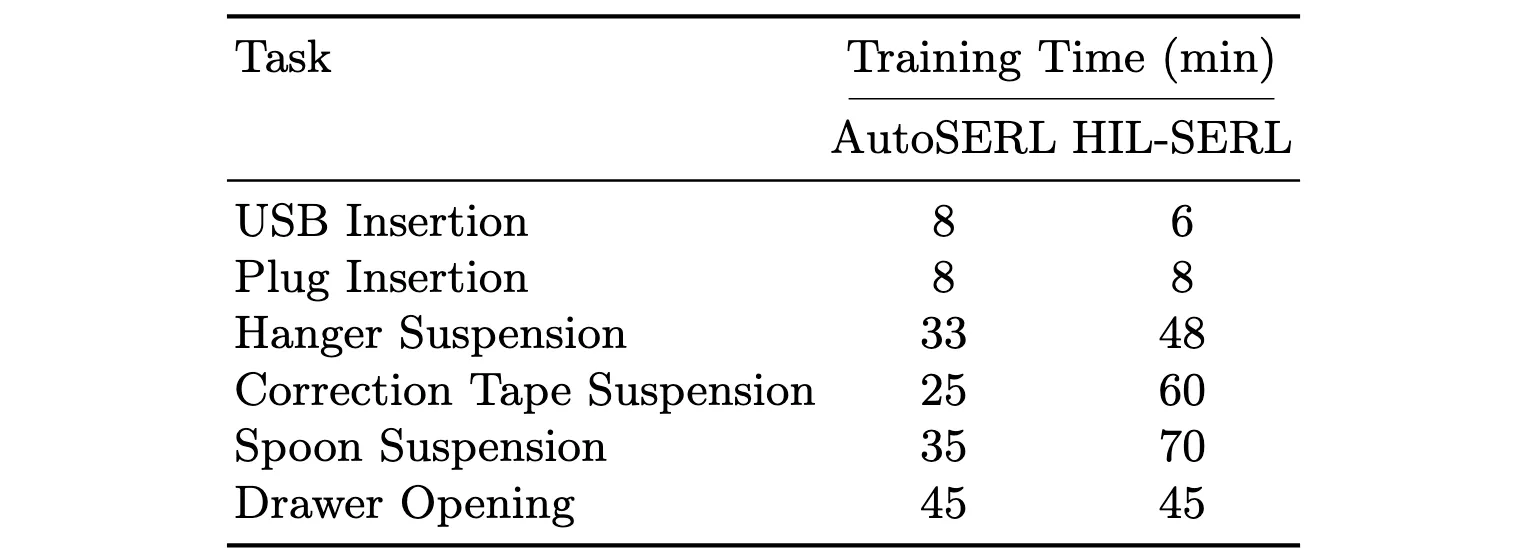
We compare AutoSERL with HIL-SERL to evaluate training efficiency. AutoSERL and HIL- SERL are assessed by measuring the minimum training time required to reach a 100% success rate.
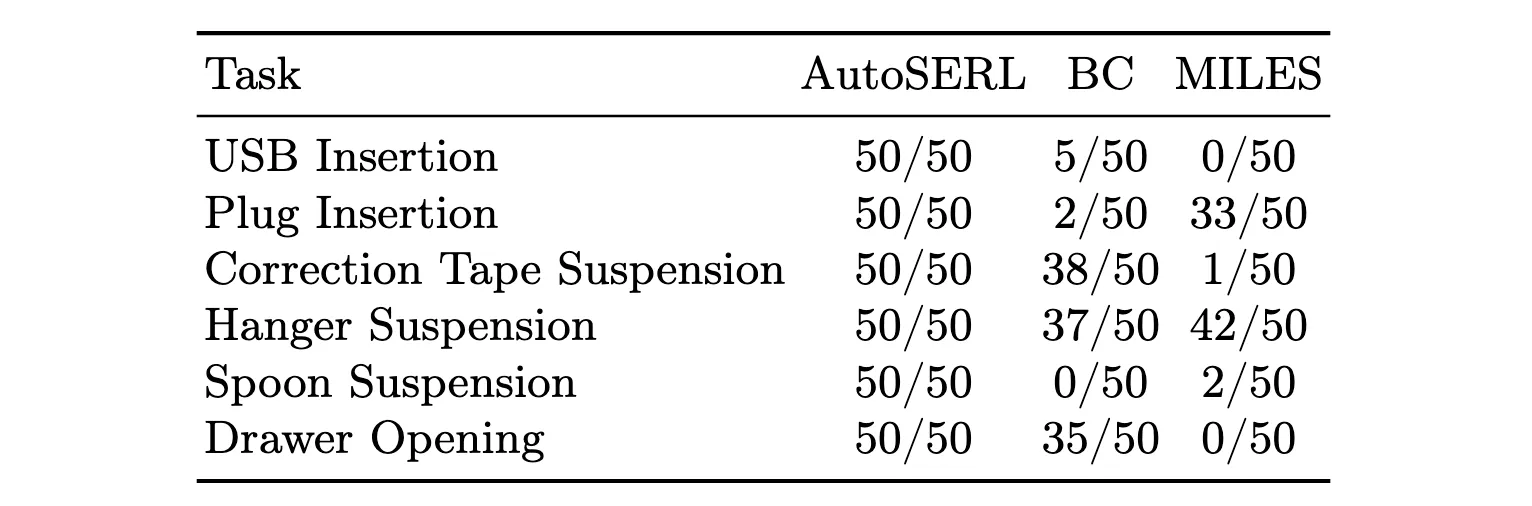
To further validate the effectiveness of AutoSERL, we compare it with BC and MILES in terms of final success rate.
Robustness Analysis
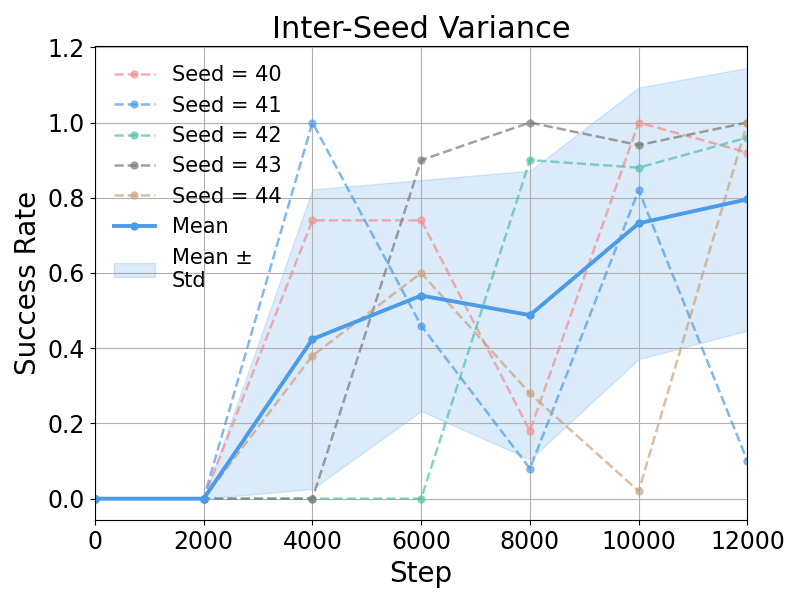
We retrain the plug insertion task with five seeds (40–44). Under all seeds, the method achieves 100% or near 100% success rates, indicating robustness to random initialization and low performance variance across different seeds.
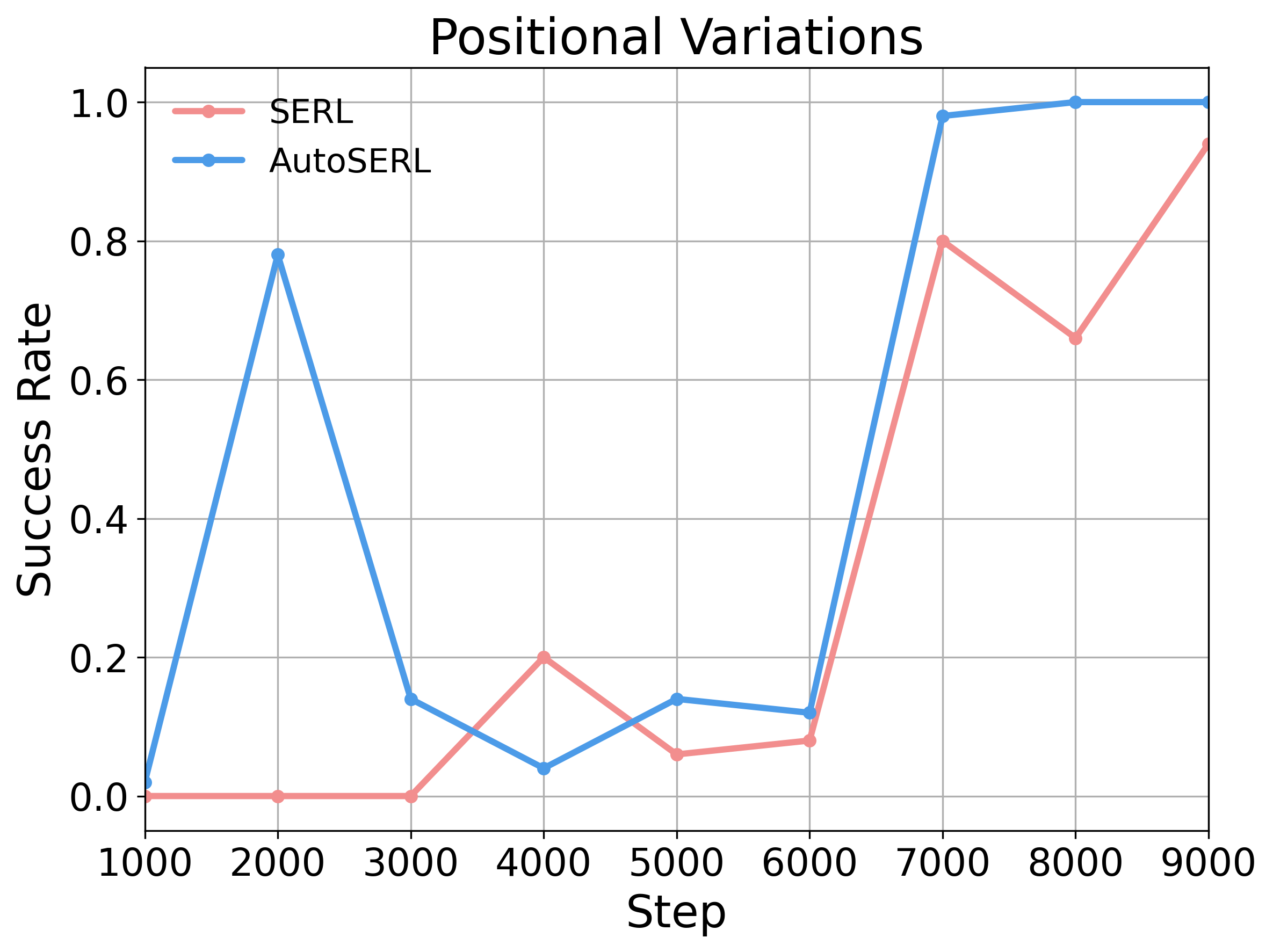
In the plug insertion task, we randomize the initial plug position within a ±3 cm range in the x–y plane while keeping the socket position fixed to evaluate robustness to positional variations. AutoSERL achieves higher success rates and more stable convergence than SERL, demonstrating improved robustness to positional variations.
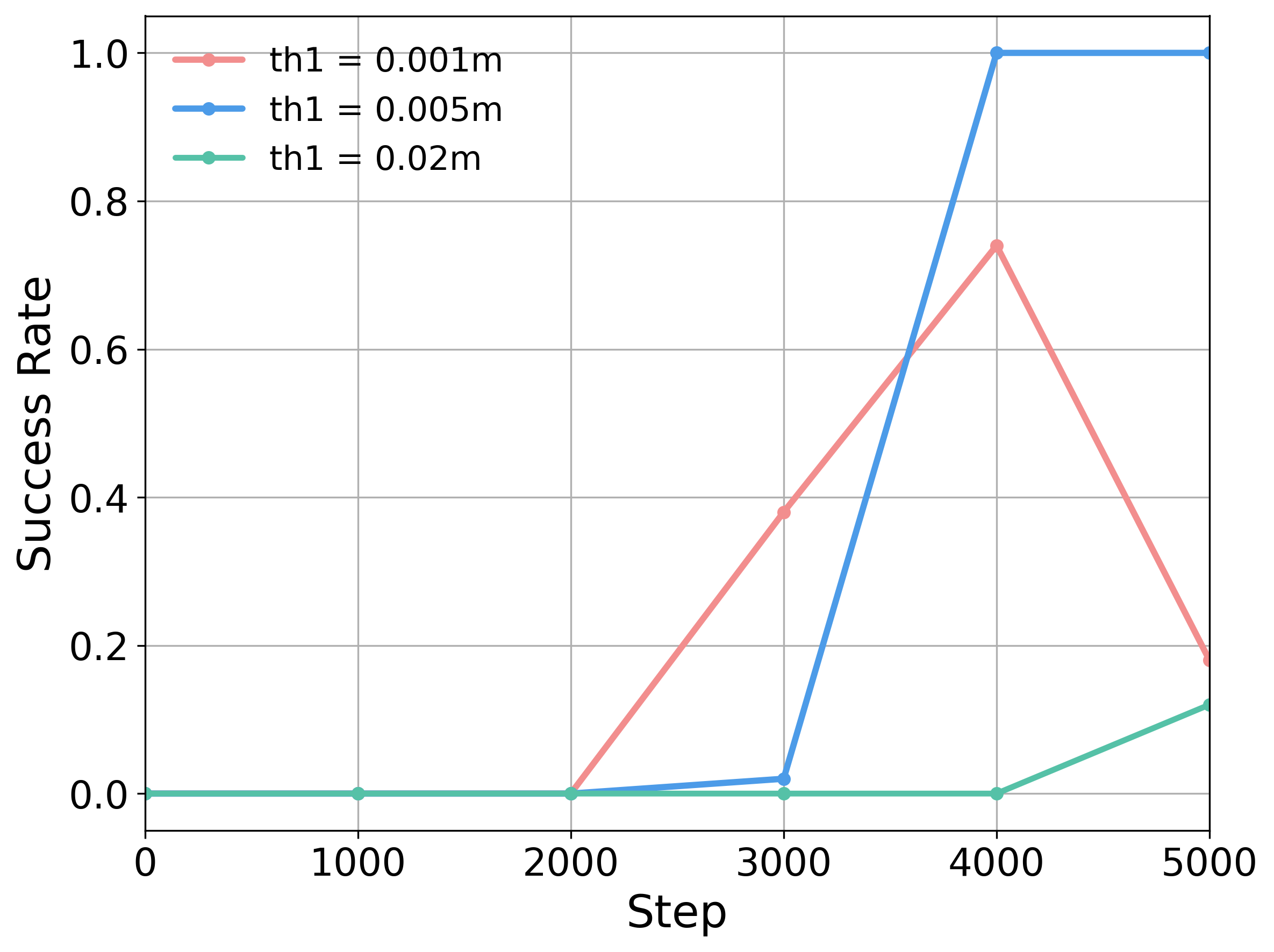
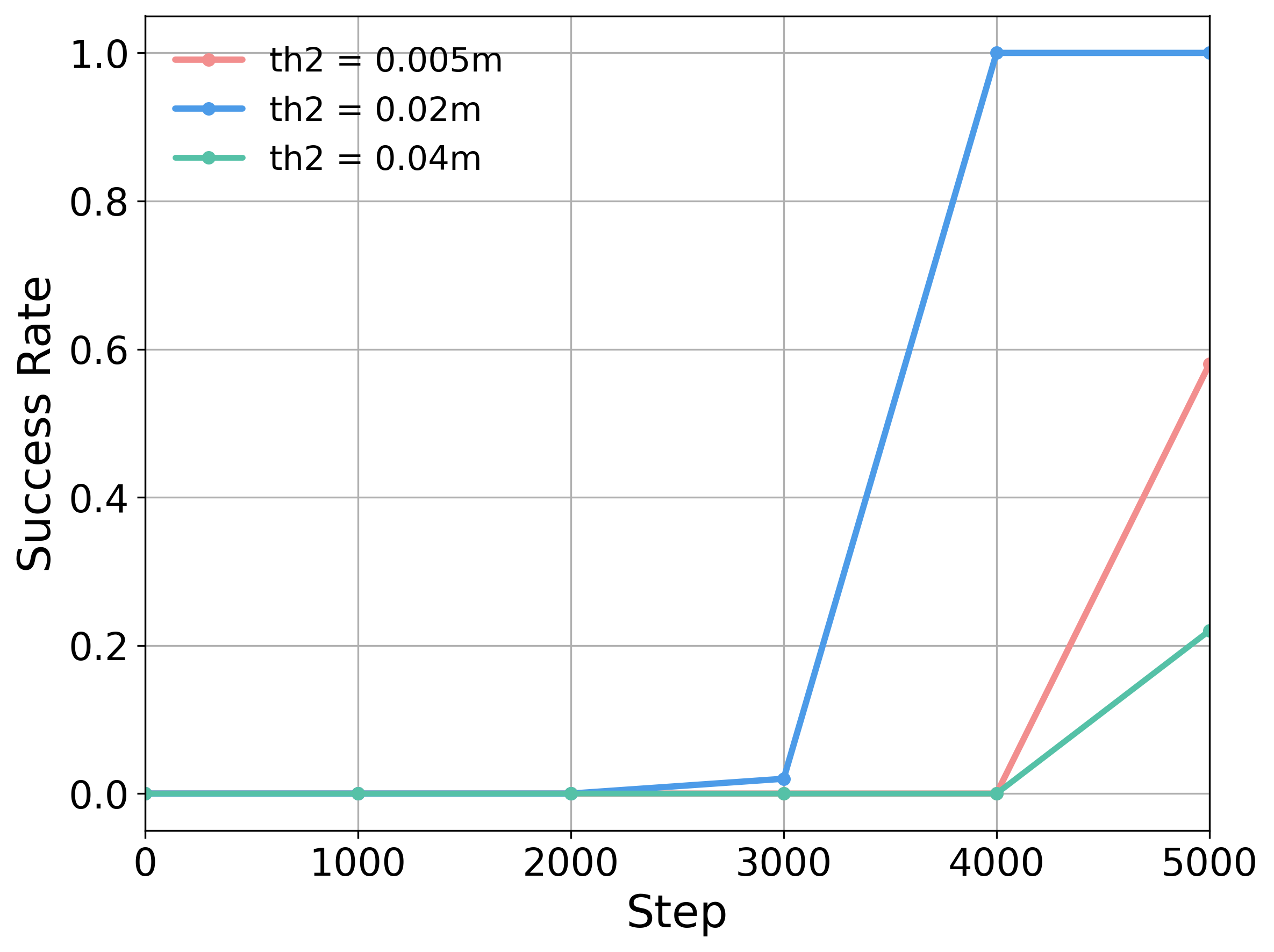
Heuristic Hyperparameter Analysis
Overall, both parameters degrade performance when set too small or too large, and perform best within a moderate range. The stagnation window length lstag defines the number of steps required for the end-effector to move beyond th1 and is set according to the task's action scale.
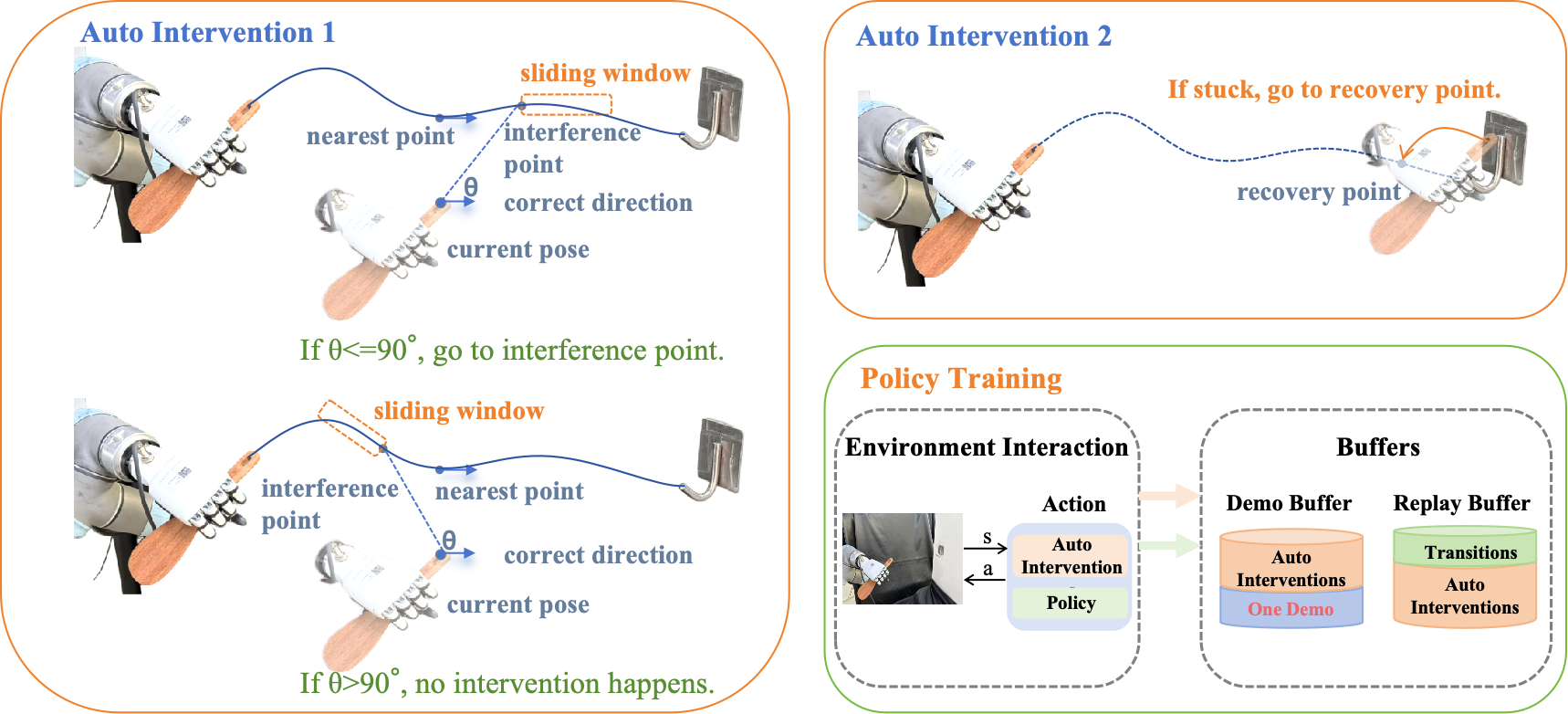
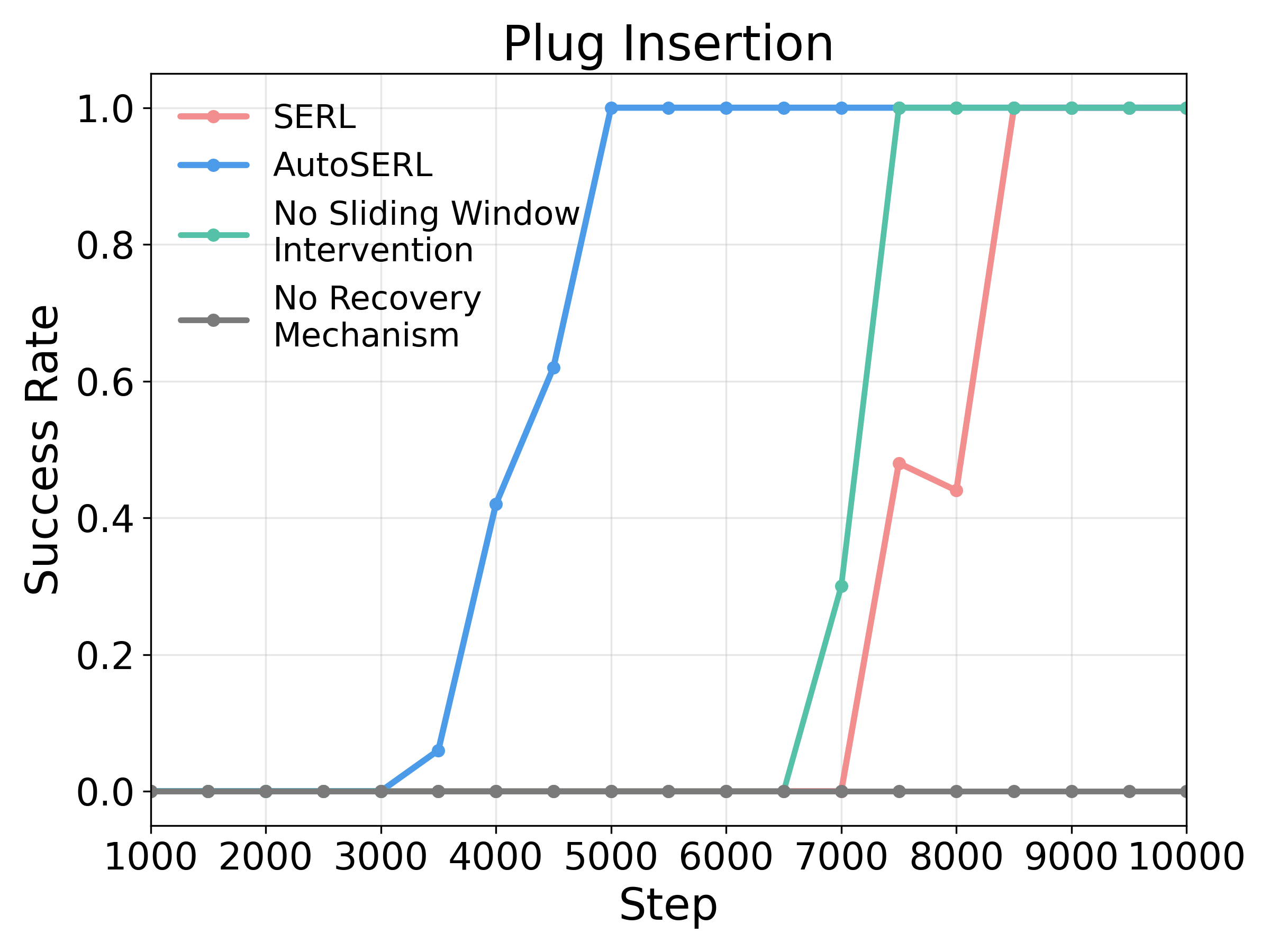
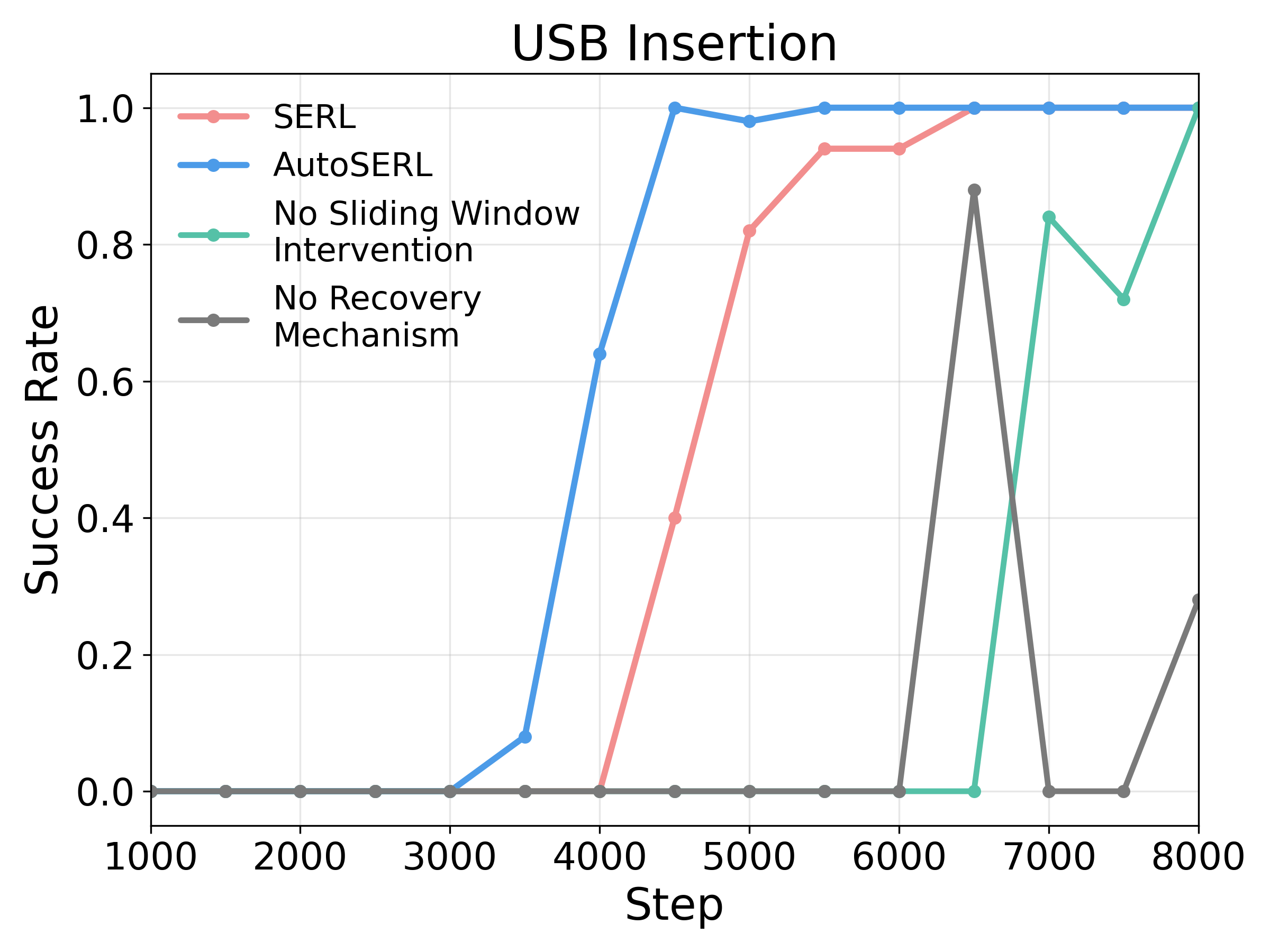
Ablation Studies
To evaluate the contribution of each component in AutoSERL, we conduct three
ablation studies: (1) No sliding window intervention: the sliding window intervention mechanism is removed, and no intervention points are used to guide the
robot during training. (2) No recovery mechanism: the safety recovery mechanism is removed, and when the robot encounters failure states, it must rely
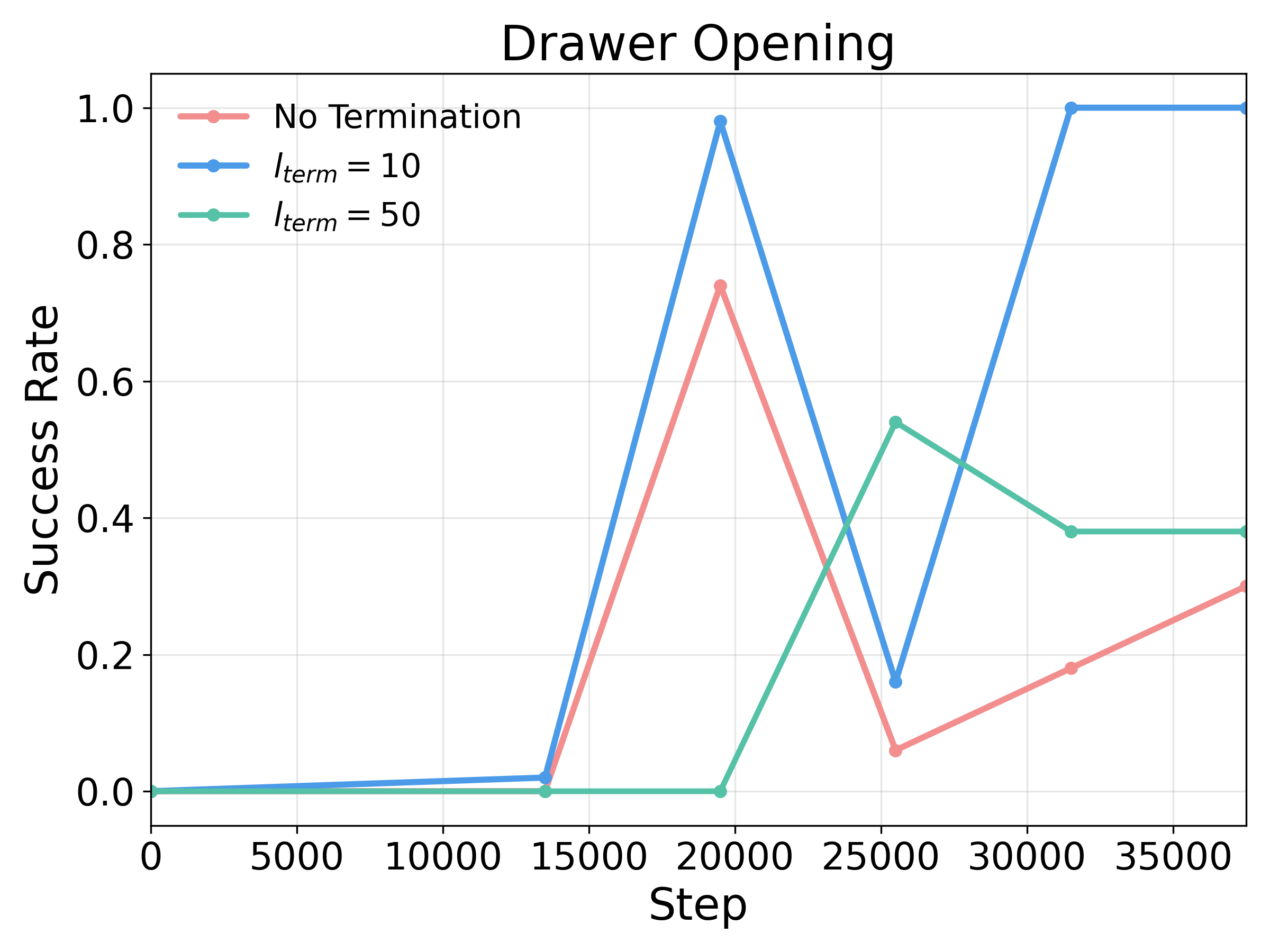
solely on its own exploration to recover. (3) No intervention termination: the intervention termination criterion is removed, and the intervention continuously
supervises the training process until the end.
Ablation results show that the sliding window intervention, recovery mechanism, and intervention termination are all essential to AutoSERL's performance, as removing any of them degrades learning efficiency or success rates.
Policy and Demonstration Trajectory Comparison
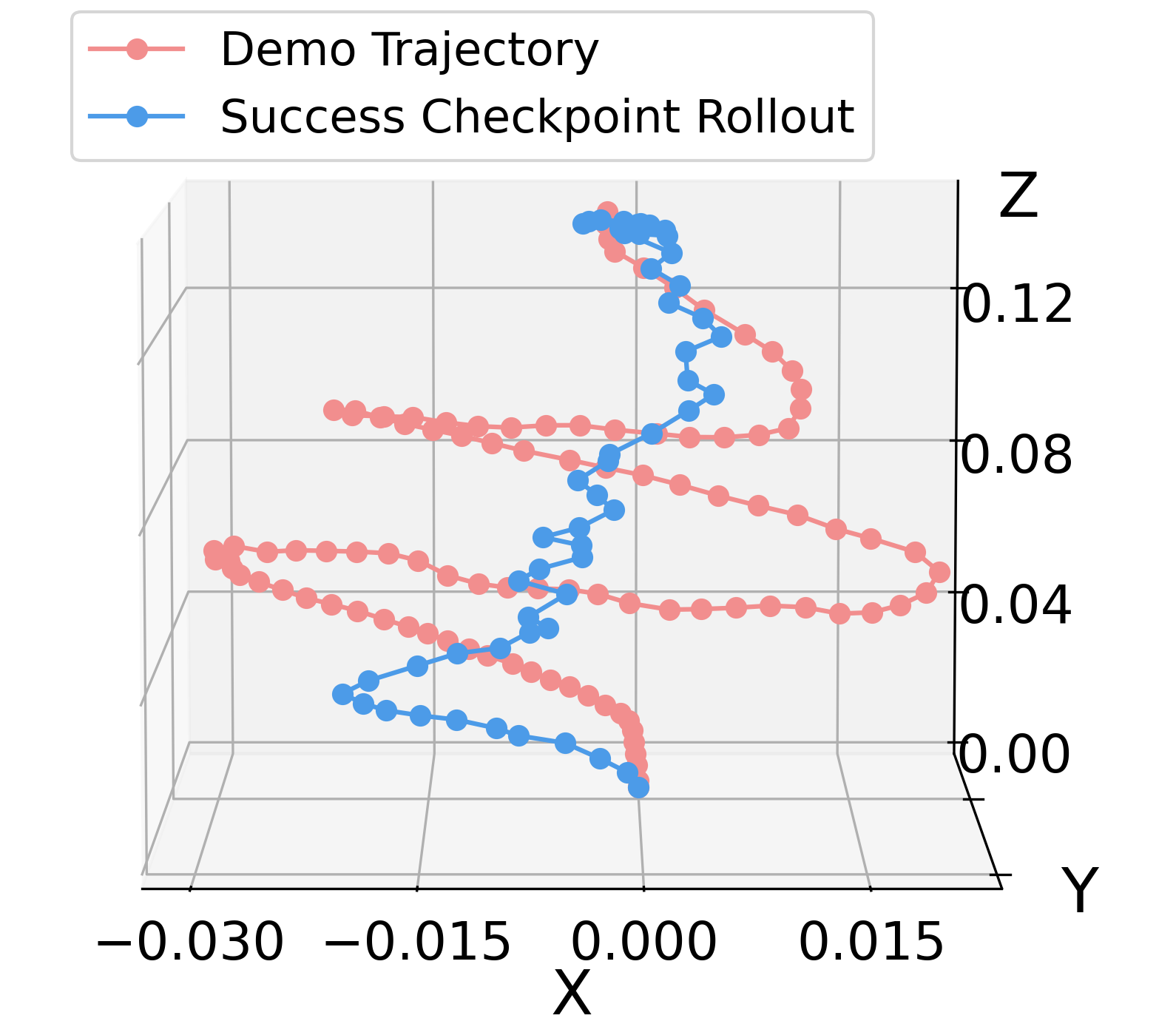
Taking the plug insertion task as an example, we collect a non-optimal demonstration trajectory of length 99 and train the policy using this trajectory. Rolling out the first checkpoint that achieves a 50/50 success rate yields a trajectory of length 54. This suggests that the policy goes beyond simple imitation and performs trajectory-level optimization over the demonstration.
Conclusion
We propose AutoSERL, a real-world RL method that enables training through automatic intervention using only a single demonstration trajectory. AutoSERL incorporates sliding window intervention, safety recovery, and intervention termination to ensure safe and stable real-world reinforcement learning. AutoSERL outperforms multi-demonstration RL, behavior cloning, and one-shot imitation learning baselines across six contact-intensive tasks spanning three task categories while matching HIL-SERL. We hope this work will inspire future research on automated real-world robotic RL and enable its extension to tasks with more diverse failure modes and higher-dimensional action spaces.
BibTeX